Double Pendulum Model [32|64bit] (2022)
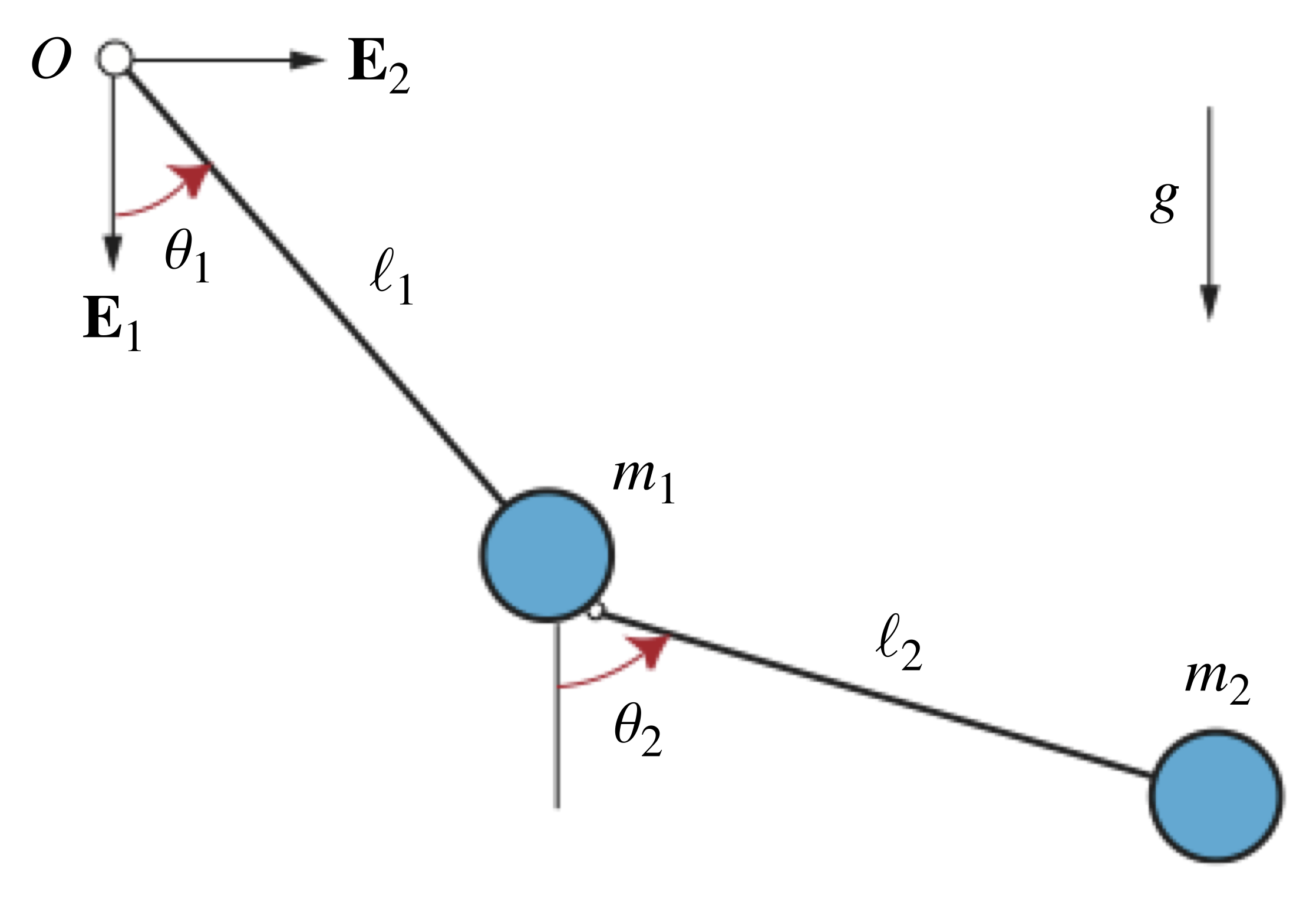
A double pendulum system has two masses on a lever arm connected by a pivot. The masses move in a circle at the top and bottom of the arm. The top mass oscillates clockwise while the bottom mass oscillates counterclockwise.
In this model both masses m1 = 1 and m2 = 1 and the arm length, l, is set to 10. Also, both masses are connected by a spring constant of k = 0.1 (so the stiffness is 10). This is a simple model and in the case of real double pendulums the angles can be more complicated and the spring constants can be more complicated.
The model uses the standard vector-vector method to solve the equations of motion for a 2-d double pendulum. The actual system involves swinging in 3 dimensions, but the Double Pendulum Model Crack Keygen can be modified to display motion in 2 dimensions and make the results easier to see.
Double pendulum motion can be influenced by a variety of forces. To use your own set of forces, such as gravity and drag, just create a Java class in the modeling tool which implements the following interface. The default values are used.
interface ModelForce {
double getGravity() /* the gravitational force */
double getDrag() /* the drag force */
void setDrag(double drag) /* the drag force */
double getSpringForce() /* the spring force */
void setSpringForce(double springForce) /* the spring force */
}
To drive the model with your own class, define the derivative of the angular position in the calculation and the derivative of the position on the x-axis.
public double u(double x, double y, double theta, ModelForce theForce) {
double u = theForce.getGravity() * Math.sin(theta);
double v = theForce.getDrag() * Math.sin(theta) * Math.sin(theta);
double W = theForce.getSpringForce() * Math.cos(theta);
double xdot = 0;
double ydot = 0;
xdot = Math.cos(theta);
ydot = Math.sin(theta);
return u – (wdot * x)
Double Pendulum Model
If you have not installed EJS yet, you can download it here.
Q:
Android Notification trigger only once
I have 2 buttons on my screen. On touch of one button I show a Notification.
I want the Notification to be shown when the other button is clicked too.
My problem is that when the first button is clicked a second time, the Notification is shown again…
What do I have to change to show the notification only once?
I have this in the onclick listener of the first button:
Intent intent = new Intent(context, “com.example.myprg:kml_feed_service”);
intent.putExtra(“feed_id”, id);
PendingIntent pendingIntent = PendingIntent.getService(context, 0, intent, 0);
Notification notification = new Notification.Builder(context)
.setContentTitle(name)
.setContentText(message)
.setAutoCancel(true)
.setWhen(System.currentTimeMillis())
.setSmallIcon(R.drawable.ic_launcher)
.setContentIntent(pendingIntent).build();
NotificationManager nm = (NotificationManager)
getSystemService(Context.NOTIFICATION_SERVICE);
nm.notify(0, notification);
A:
I would make a global boolean that is checked when you show the notification and reset it once the notification is shown.
See if that helps.
A:
Try setting a unique id for the PendingIntent and then also setting an extra with it:
PendingIntent pendingIntent = PendingIntent.getService(context, id, intent, 0);
intent.putExtra(“myUniqueId”, id);
and then in your notification code check for the Id:
Intent intent = new Intent(context, “com.example.myprg:kml_feed_service”);
Intent intent2 = new Intent(context, “com.example.myprg:kml_feed_service”);
b7e8fdf5c8
Double Pendulum Model Crack+ Download (Final 2022)
The Double Pendulum Model displays the motion of a double pendulum with the two pendula connected by an inelastic rod. The swing of a pendulum is by definition a circle and the angle from the vertical is shown in the plot. The angle at the top of the plot is called the latitude and the angle at the bottom is called the longitude.
The simulated system has two angles: the latitude and the longitude. The latitude is analogous to the position of the swing of a pendulum at the top of its arc. The longitude is the angle of the pendulum swing with respect to the vertical and can be thought of as a position of the swing of the pendulum at the bottom of its arc. These two angles are related by the equation:
latitude = longitude – 60. There are also two quantities of interest, the velocity of the system and the conserved energy. The velocity of the system is shown in the plot in polar coordinates in the upper-left hand corner, and the conserved energy is shown in the center of the plot. The usual conservation law states that energy is conserved for the system:
E = Gm~m*1 + Gm*m2*sin2*latitude
The plot shows two lines, one for the oscillations about the north pole and one for the oscillations about the south pole. For each of the two cases, the energy is conserved over many periods of oscillation. In addition, the energy is shown to oscillate about a value of zero, which is the conserved energy value for the system. In other words, the total oscillating energy during one period is zero.
Many plots of motion can be generated from this model, including the Poincare map. A Poincare plot is a plot that shows the motion of a system, as a point in phase space (an energy-position), over a cycle of motion. This plot is generated by setting the initial conditions and then plotting the energies of the system. Initially, the coordinate for the initial state is set to zero and the initial energy is set to a positive value. The plotted point is also shown by an arrow directed to a location on the Poincare plot. When you adjust the initial conditions of the simulation, the shape of the pendulum motion changes as the initial energy of the system is changed. As the energy increases, the pendulum
What’s New in the Double Pendulum Model?
* CLICK TO MOVE THE POINCARÉ MAP, LEFT CLICK TO SET THE SYSTEM’S INITIAL CONDITIONS
* MOUSE CLICK TO SET AND RESET SYSTEM’S FACTOR OF ENERGY
* DRAG TO TRACK THE SYSTEM
* RIGHT CLICK TO MAKE A SAVED POINCARÉ MAP
* LEFT CLICK TO MAKE A SAVED POINCARÉ MAP
* MIDDLE CLICK TO MAKE A SAVED POINCARÉ MAP
* RESET POINCARÉ MAP TO RETURN TO SYSTEM’S STARTING POINT
Double Pendulum Model Introduction:
This simulation model represents a Hamiltonian system that is made up of two pendulums of equal length attached to the top of a post. As the system evolves in time, the position of the system is described by the angle of the long pendulum and the angular velocity of the short pendulum. The state of the system is specified by a two dimensional vector, which includes both angle and angular velocity. Initially the long pendulum will have an angle of zero (refer to the image at the top of the page) and the short pendulum will have an angular velocity of zero (refer to the image on the right of the page). Because the two pendulums have equal lengths, they are in equilibrium, with constant momentum. The horizontal and vertical position of the long pendulum is controlled by the mouse. Dragging the mouse from left to right will drive the system further from equilibrium, drag it back and the system will return to its equilibrium position. The open source, EJS, simulation tool is currently being used by several US Navy personnel to do research on double pendulums. The simulation may be run in “continuous mode” where drag is used to study the behavior of the system, or it may be run in “update mode”. In update mode, the system will be driven so that the angle of the long pendulum is rapidly set to a specific angle, and the short pendulum’s angular velocity is set to a specific value. Upon reaching the specified angle, the simulation will halt.
Double Pendulum Model Screenshots:
Double Pendulum Model Main:
Left: initial plot. Drag to move the long pendulum and adjust the angular velocity of the short pendulum.
Right: after dragging the mouse to the right, the system
System Requirements:
Minimum:
OS: Windows 7 (32 or 64 bit)
CPU: 2.2 GHz Dual Core or better
Memory: 4 GB RAM
DirectX: DirectX 10
Network: Broadband Internet connection
Storage: 700 MB available space
Video: DirectX 10 compatible video card with 512MB dedicated video memory
Sound Card: DirectX 10 compatible sound card
Additional Notes:
Requires 500MB free space
Please Note: You must download all of the files below in order to extract the programs listed.
Game of
http://www.hva-concept.com/url-sentry-crack-download-for-pc-latest-2022/
http://match2flame.com/audio-cd-copier-crack-license-key-free-win-mac/
https://brinke-eq.com/advert/myspace-booster-crack-download-latest-2022/
https://gembeltraveller.com/wp-content/uploads/2022/07/vyagiad-1.pdf
http://mensweater.com/?p=2884
https://blacksocially.com/upload/files/2022/07/gGd4HJlO3mJmzQslNXWs_04_a9eea49471834f6a7e5e10ecc0384246_file.pdf
https://tbilisiartmap.ge/wp-content/uploads/2022/07/albfra.pdf
https://l1.intimlobnja.ru/ninely-2/
https://www.thailand-visa-service.com/copyandpaste-crack-activation-pc-windows.html
https://rosaedu.com/qutim-crack-free-win-mac-final-2022/
https://superstitionsar.org/wp-content/uploads/2022/07/Simnor_Web_Explorer_2006.pdf
https://kalapor.com/pidgin-nudge-plugin-crack-activation-key-free-win-mac/
https://media.smaskstjohnpaul2maumere.sch.id/upload/files/2022/07/8wkeSCU6PybVwzpQmuWj_04_a9eea49471834f6a7e5e10ecc0384246_file.pdf
http://www.freddypilar.com/spelling-for-grade-3-list-2-crack-torrent-free/
https://www.pokemythology.net/wp-content/uploads/2022/07/ACDC_2_png_039s.pdf
https://khakaidee.com/beluga-player-crack-with-serial-key-pc-windows/
https://www.b-webdesign.org/dir-wowonder/upload/files/2022/07/nk5c74yTMFmnBnM4N7Fo_04_ce9c6a38c98250c4424a33ddbb22486d_file.pdf
https://okinawahousingportal.com/cmath-for-borland-c-c-crack-patch-with-serial-key/
https://secondhandbikes.co.uk/advert/myrouter-crack-free-3264bit-april-2022/
https://www.ccd.edu/system/files/webform/nahwors64.pdf